
Page 23 - Revista EAA - Edição 83
P. 23
ROTA 2030 ESPECIAL
locidade no futuro). Todos esses objetos podem
SENSORES
ser classificados em estáticos e dinâmicos.
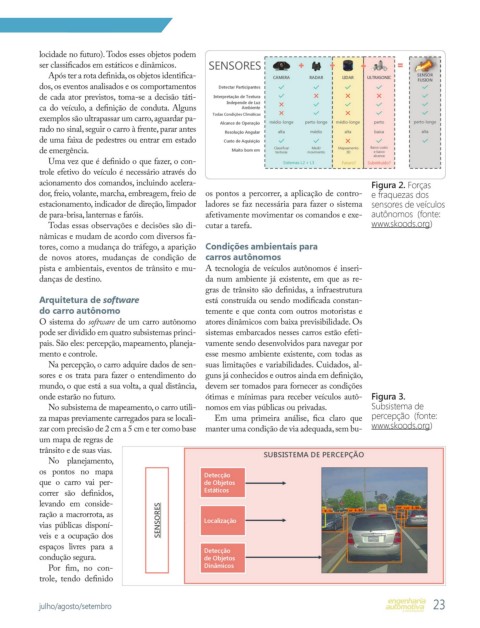
Após ter a rota definida, os objetos identifica- CAMERA RADAR LIDAR ULTRASONIC SENSOR
FUSION
dos, os eventos analisados e os comportamentos Detectar Participantes
de cada ator previstos, toma-se a decisão táti- Interpretação de Textura
Independe de Luz
ca do veículo, a definição de conduta. Alguns Ambiente
Todas Condições Climáticas
exemplos são ultrapassar um carro, aguardar pa-
Alcance de Operação médio-longe perto-longe médio-longe perto perto-longe
rado no sinal, seguir o carro à frente, parar antes Resolução Angular alta médio alta baixa alta
de uma faixa de pedestres ou entrar em estado Custo de Aquisição
Medir
de emergência. Muito bom em Classificar movimento Mapeamento Baixo custo
e baixo
texturas
3D
alcance
Uma vez que é definido o que fazer, o con- Sistemas L2 + L3 Futuro? Substituído?
trole efetivo do veículo é necessário através do
acionamento dos comandos, incluindo acelera- Figura 2. Forças
dor, freio, volante, marcha, embreagem, freio de os pontos a percorrer, a aplicação de contro- e fraquezas dos
estacionamento, indicador de direção, limpador ladores se faz necessária para fazer o sistema sensores de veículos
de para-brisa, lanternas e faróis. afetivamente movimentar os comandos e exe- autônomos (fonte:
www.skoods.org)
Todas essas observações e decisões são di- cutar a tarefa.
nâmicas e mudam de acordo com diversos fa-
tores, como a mudança do tráfego, a aparição Condições ambientais para
de novos atores, mudanças de condição de carros autônomos
pista e ambientais, eventos de trânsito e mu- A tecnologia de veículos autônomos é inseri-
danças de destino. da num ambiente já existente, em que as re-
gras de trânsito são definidas, a infraestrutura
Arquitetura de software está construída ou sendo modificada constan-
do carro autônomo temente e que conta com outros motoristas e
O sistema do software de um carro autônomo atores dinâmicos com baixa previsibilidade. Os
pode ser dividido em quatro subsistemas princi- sistemas embarcados nesses carros estão efeti-
pais. São eles: percepção, mapeamento, planeja- vamente sendo desenvolvidos para navegar por
mento e controle. esse mesmo ambiente existente, com todas as
Na percepção, o carro adquire dados de sen- suas limitações e variabilidades. Cuidados, al-
sores e os trata para fazer o entendimento do guns já conhecidos e outros ainda em definição,
mundo, o que está a sua volta, a qual distância, devem ser tomados para fornecer as condições
onde estarão no futuro. ótimas e mínimas para receber veículos autô- Figura 3.
No subsistema de mapeamento, o carro utili- nomos em vias públicas ou privadas. Subsistema de
za mapas previamente carregados para se locali- Em uma primeira análise, fica claro que percepção (fonte:
www.skoods.org)
zar com precisão de 2 cm a 5 cm e ter como base manter uma condição de via adequada, sem bu-
um mapa de regras de
trânsito e de suas vias.
SUBSISTEMA DE PERCEPÇÃO
No planejamento,
os pontos no mapa Detecção
que o carro vai per- de Objetos
Estáticos
correr são definidos,
levando em conside-
ração a macrorrota, as Localização
vias públicas disponí- SENSORES
veis e a ocupação dos
espaços livres para a
Detecção
condução segura. de Objetos
Dinâmicos
Por fim, no con-
trole, tendo definido
julho/agosto/setembro 23