
Page 16 - Revista EAA - Edição 74
P. 16
CONECTIVIDADE INTRODUÇÃO À CONECTIVIDADE
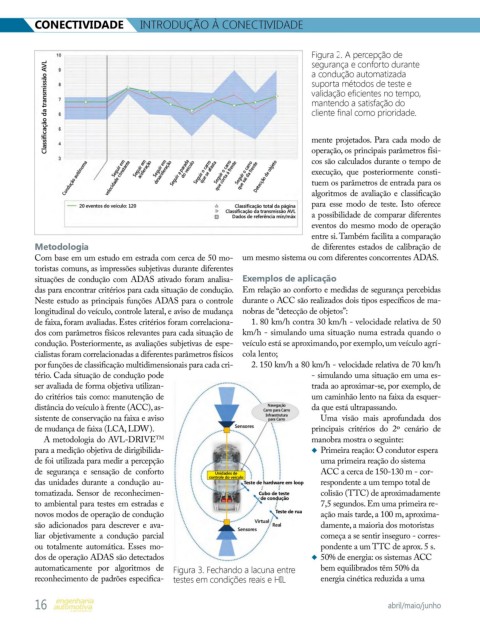
Figura 2. A percepção de
segurança e conforto durante
Classificação da transmissão AVL suporta métodos de teste e
a condução automatizada
validação eficientes no tempo,
mantendo a satisfação do
cliente final como prioridade.
mente projetados. Para cada modo de
Seguir em
Condução autônoma velocidade constante Seguir em aceleração Seguir em Seguir a parada do veículo Seguir o carro Seguir o carro Seguir o carro Detecção de objeto operação, os principais parâmetros físi-
desaceleração
cos são calculados durante o tempo de
que corta à frente
que se afasta
que sai da frente
execução, que posteriormente consti-
tuem os parâmetros de entrada para os
para esse modo de teste. Isto oferece
20 eventos do veículo: 120 Classificação total da página algoritmos de avaliação e classificação
Classificação da transmissão AVL
Dados de referência mín/máx a possibilidade de comparar diferentes
eventos do mesmo modo de operação
entre si. Também facilita a comparação
Metodologia de diferentes estados de calibração de
Com base em um estudo em estrada com cerca de 50 mo- um mesmo sistema ou com diferentes concorrentes ADAS.
toristas comuns, as impressões subjetivas durante diferentes
situações de condução com ADAS ativado foram analisa- Exemplos de aplicação
das para encontrar critérios para cada situação de condução. Em relação ao conforto e medidas de segurança percebidas
Neste estudo as principais funções ADAS para o controle durante o ACC são realizados dois tipos específicos de ma-
longitudinal do veículo, controle lateral, e aviso de mudança nobras de “detecção de objetos”:
de faixa, foram avaliadas. Estes critérios foram correlaciona- 1. 80 km/h contra 30 km/h - velocidade relativa de 50
dos com parâmetros físicos relevantes para cada situação de km/h - simulando uma situação numa estrada quando o
condução. Posteriormente, as avaliações subjetivas de espe- veículo está se aproximando, por exemplo, um veículo agrí-
cialistas foram correlacionadas a diferentes parâmetros físicos cola lento;
por funções de classificação multidimensionais para cada cri- 2. 150 km/h a 80 km/h - velocidade relativa de 70 km/h
tério. Cada situação de condução pode - simulando uma situação em uma es-
ser avaliada de forma objetiva utilizan- trada ao aproximar-se, por exemplo, de
do critérios tais como: manutenção de um caminhão lento na faixa da esquer-
Navegação
distância do veículo à frente (ACC), as- Carro para Carro da que está ultrapassando.
Infraestrutura
sistente de conservação na faixa e aviso para Carro Uma visão mais aprofundada dos
Sensores
de mudança de faixa (LCA, LDW). principais critérios do 2º cenário de
TM
A metodologia do AVL-DRIVE manobra mostra o seguinte:
para a medição objetiva de dirigibilida- u Primeira reação: O condutor espera
de foi utilizada para medir a percepção uma primeira reação do sistema
de segurança e sensação de conforto Unidades de ACC a cerca de 150-130 m - cor-
controle do veículo
das unidades durante a condução au- Teste de hardware em loop respondente a um tempo total de
tomatizada. Sensor de reconhecimen- Cubo de teste colisão (TTC) de aproximadamente
de condução
to ambiental para testes em estradas e 7,5 segundos. Em uma primeira re-
Teste de rua
novos modos de operação de condução ação mais tarde, a 100 m, aproxima-
Virtual
são adicionados para descrever e ava- Real damente, a maioria dos motoristas
Sensores
liar objetivamente a condução parcial começa a se sentir inseguro - corres-
ou totalmente automática. Esses mo- pondente a um TTC de aprox. 5 s.
dos de operação ADAS são detectados u 50% de energia: os sistemas ACC
automaticamente por algoritmos de Figura 3. Fechando a lacuna entre bem equilibrados têm 50% da
reconhecimento de padrões especifica- testes em condições reais e HIL energia cinética reduzida a uma
16 abril/maio/junho