
Page 17 - Revista EAA - Edição 74
P. 17
ESPECIAL
distância de aproximadamente 50 m do veículo da frente
Sistema de visualização
- correspondente a um TTC de aproximadamente 4,5 s.
Os sistemas ACC com uma primeira reação retardada
têm que frear mais intensamente para evitar que fiquem Motores lineares
Sistema de
muito próximos do objetivo. Neste caso, o conforto e a direção
segurança percebida são influenciados.
u Pista de desaceleração: A pista de desaceleração é um
critério de conforto clássico. Uma pista plana e suave Interfaces
do sensor
proporciona mais conforto do que uma pista irregular. Plataforma
ECUs do Veículo de simulação
Diferentes fabricantes têm filosofias diferentes sobre a
forma da pista.
u TTC: é um critério clássico para a segurança percebida. Dinamômetros
O TTC mínimo em relação à velocidade real do veículo, de rolo
ao se aproximar de um objeto lento na frente, foi iden-
tificado como um parâmetro muito importante para a
Sistema de Célula de
segurança percebida. trem de força teste do veículo
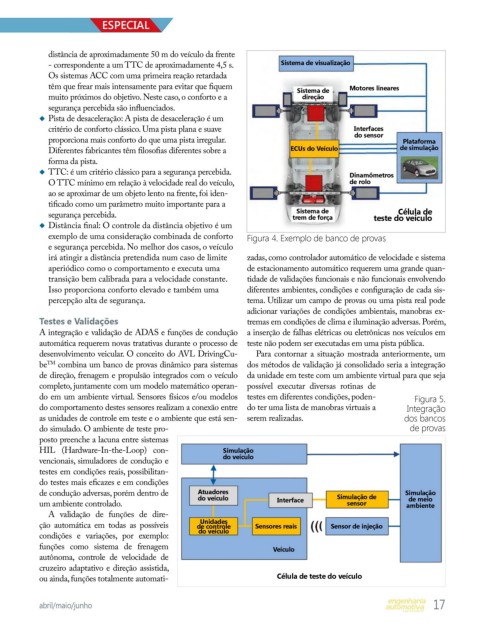
u Distância final: O controle da distância objetivo é um
exemplo de uma consideração combinada de conforto Figura 4. Exemplo de banco de provas
e segurança percebida. No melhor dos casos, o veículo
irá atingir a distância pretendida num caso de limite zadas, como controlador automático de velocidade e sistema
aperiódico como o comportamento e executa uma de estacionamento automático requerem uma grande quan-
transição bem calibrada para a velocidade constante. tidade de validações funcionais e não funcionais envolvendo
Isso proporciona conforto elevado e também uma diferentes ambientes, condições e configuração de cada sis-
percepção alta de segurança. tema. Utilizar um campo de provas ou uma pista real pode
adicionar variações de condições ambientais, manobras ex-
Testes e Validações tremas em condições de clima e iluminação adversas. Porém,
A integração e validação de ADAS e funções de condução a inserção de falhas elétricas ou eletrônicas nos veículos em
automática requerem novas tratativas durante o processo de teste não podem ser executadas em uma pista pública.
desenvolvimento veicular. O conceito do AVL DrivingCu- Para contornar a situação mostrada anteriormente, um
TM
be combina um banco de provas dinâmico para sistemas dos métodos de validação já consolidado seria a integração
de direção, frenagem e propulsão integrados com o veículo da unidade em teste com um ambiente virtual para que seja
completo, juntamente com um modelo matemático operan- possível executar diversas rotinas de
do em um ambiente virtual. Sensores físicos e/ou modelos testes em diferentes condições, poden- Figura 5.
do comportamento destes sensores realizam a conexão entre do ter uma lista de manobras virtuais a Integração
as unidades de controle em teste e o ambiente que está sen- serem realizadas. dos bancos
do simulado. O ambiente de teste pro- de provas
posto preenche a lacuna entre sistemas
HIL (Hardware-In-the-Loop) con- Simulação
do veículo
vencionais, simuladores de condução e
testes em condições reais, possibilitan-
do testes mais eficazes e em condições
de condução adversas, porém dentro de Atuadores Simulação de Simulação
do veículo Interface de meio
um ambiente controlado. sensor ambiente
A validação de funções de dire-
Unidades
ção automática em todas as possíveis de controle Sensores reais Sensor de injeção
do veículo
condições e variações, por exemplo:
funções como sistema de frenagem Veículo
autônoma, controle de velocidade de
cruzeiro adaptativo e direção assistida,
Célula de teste do veículo
ou ainda, funções totalmente automati-
abril/maio/junho 17